Helical Tube - 2026-04-15
날짜: 2026-04-15
작성자: 최원재
프로젝트: Helical Tube
목적
내경이 12mm 외경이 15mm 인 helical tube 에 11 mm ECT bobbin probe 를 삽입하려고해. helical 의 반경은 2m 이고 1 turn 할때 처음과 끝이 2 m 차이가나. 보빈 프로브에 마찰때문에 속도가 느려지는가?
네, 마찰로 속도가 느려집니다. 주요 원인을 정리하면
기하 조건
헬릭스 반경 R=2m, 피치 p=2m → 피치각 α = arctan(p/2πR) ≈ 9.04° 곡률반경 ρ = R + p²/(4π²R) ≈ 2.05 m 튜브 ID 12mm − 프로브 11mm → 직경 간극 1mm (반경 0.5mm) 마찰이 커지는 이유
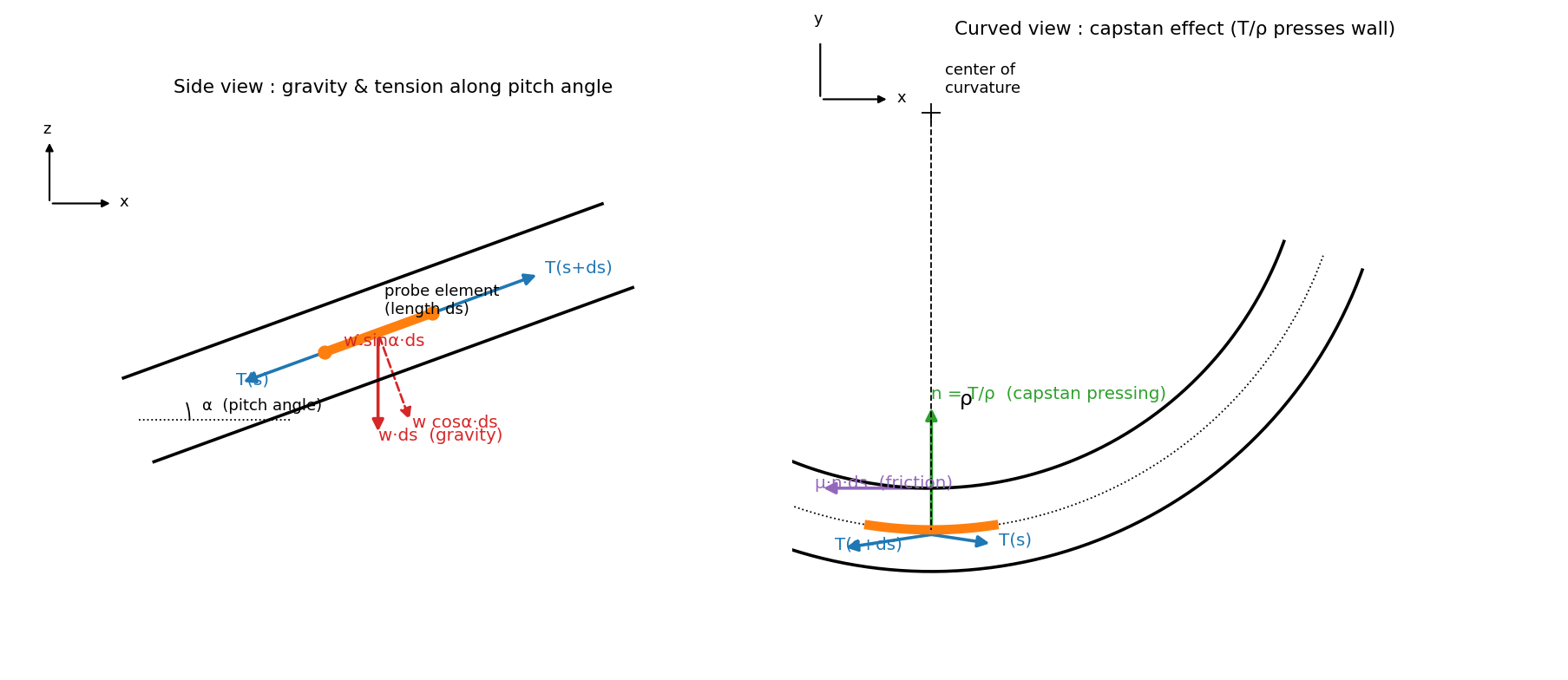
Capstan(벨트) 효과: 곡선 경로에서 케이블 장력이 지수적으로 증가합니다. T_out/T_in = e^(μθ). μ≈0.3, 1 turn(θ=2π) 기준 ≈ e^1.88 ≈ 6.6배. 여러 turn을 통과할수록 견인력이 폭증 → 속도 저하 또는 정지(stick).
피치각에 의한 중력 성분: 수직 성분이 있으면 mg·sin(9°) ≈ 0.157·mg 가 추가 저항.
강체 프로브의 곡선 통과 제약: 강체 길이 L에 대해 새지타 s = L²/(8ρ) ≤ 간극(1mm). → L_max ≈ √(8·2.05·0.001) ≈ 128 mm. bobbin 코일 segment가 이보다 길거나 강성이 높으면 벽에 강하게 눌려 normal force ↑ → 마찰 급증.
결론: 11mm bobbin은 들어가긴 하지만, 헬리컬 1 turn당 capstan 효과로 견인장력이 수 배씩 누적되어 속도가 현저히 느려지고, turn 수가 많아지면 push-pull 한계에 도달해 멈출 수 있습니다. 짧은 segment·유연 조인트·저마찰 코팅(PTFE 슬리브) 적용을 권장합니다.
friction_model.py
코드 작성 완료 — friction_model.py 와 결과 그래프 friction_result.png.
핵심 수식
정상상태(등속) 가정 시 ODE:
해석해:
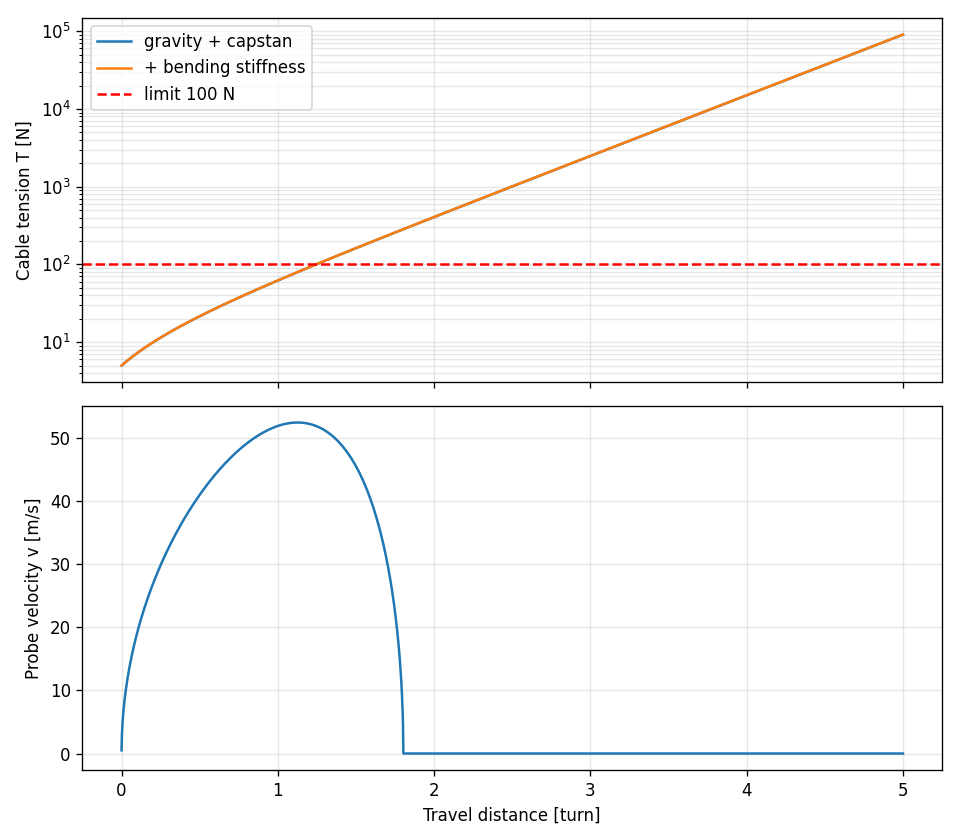
주어진 조건 결과 (μ=0.3, T₀=5N, m'=0.2 kg/m 가정)
피치각 9.04°, 곡률반경 2.05 m, 1 turn 경로 12.72 m, 간극 0.5 mm, 강체 통과한계 128 mm 약 1.2 turn 만에 케이블 장력이 100 N 초과 → 마찰로 인한 견인 한계 도달, 속도 급감/정지 발생 mu, T0, EI, probe_lin_mass, n_turns 값을 바꿔가며 시뮬레이션 가능합니다.
여기서 장력은 프로브가 전진하면서 생기는 누적된 장력이지?
네, 맞습니다.
T(s) 의 정의: 경로 좌표 s 에서 케이블(또는 프로브 본체)에 걸려있는 축방향 인장력입니다. "누적"이라는 표현이 정확히 맞는데, 식을 적분해 보면
즉, 입구쪽 초기 장력 T₀ 에, 그 지점까지 프로브가 지나온 경로 전체에서 겪은 마찰·중력·관성력을 모두 더한 값입니다.
누적되는 이유
s 위치의 프로브가 움직이려면, 그 뒤쪽(이미 튜브 안에 들어간) 모든 구간의 저항을 뚫고 끌려와야 합니다. 뒤 구간의 저항이 클수록 그 앞단에 더 큰 힘을 가해야 하므로, 입구(당기는 쪽)로 갈수록 T 가 커집니다. Capstan 항 (μ/ρ)·T 가 T 자신에 비례하므로, 누적이 선형이 아닌 지수적으로 증가합니다. 방향 규약
s 는 프로브 선단(앞쪽)에서 입구(뒤쪽/당기는 쪽) 방향으로 증가한다고 두면, T(0) = 선단 저항(≈0 또는 밀어내는 힘), T(L) = 오퍼레이터가 당겨야 하는 힘. 코드에서는 반대 방향으로 적분해도 수식은 동일, 부호만 주의하면 됩니다. 따라서 그래프에서 T 가 지수적으로 올라가는 것은 "들어갈수록 장력이 쌓여서 점점 더 세게 당겨야 한다"는 의미이고, T_limit 을 넘는 순간이 바로 견인 한계 → stick(정지) 조건입니다.
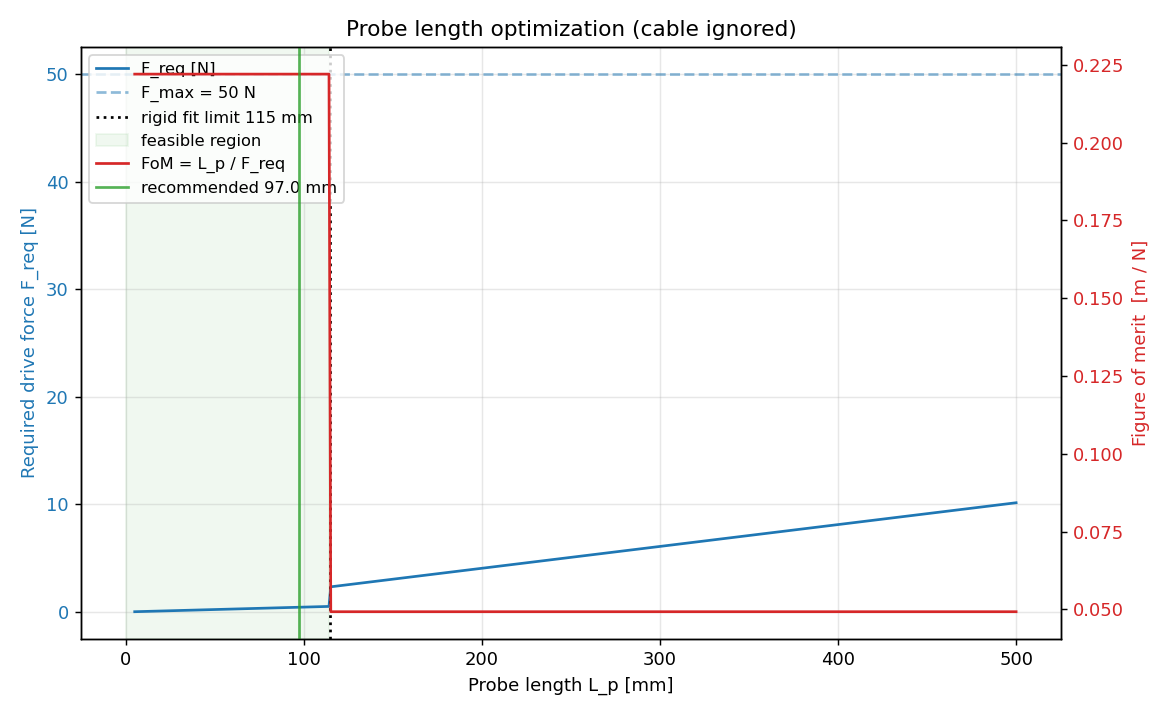
새 파일 probe_length_opt.py, 결과 그래프 probe_length_opt.png.
분석 요약
3가지 제약:
(A) 기하 통과성: sagitta ≤ 간극 →
rigid 영역에서
진행 내용
TODO
- [ ]